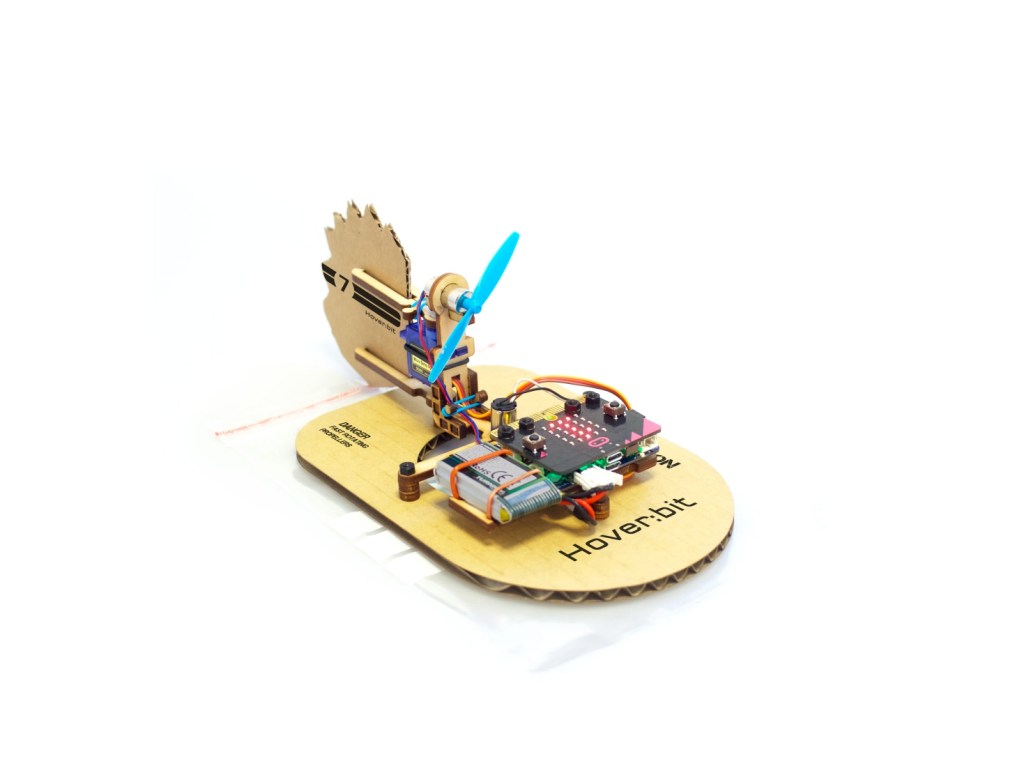

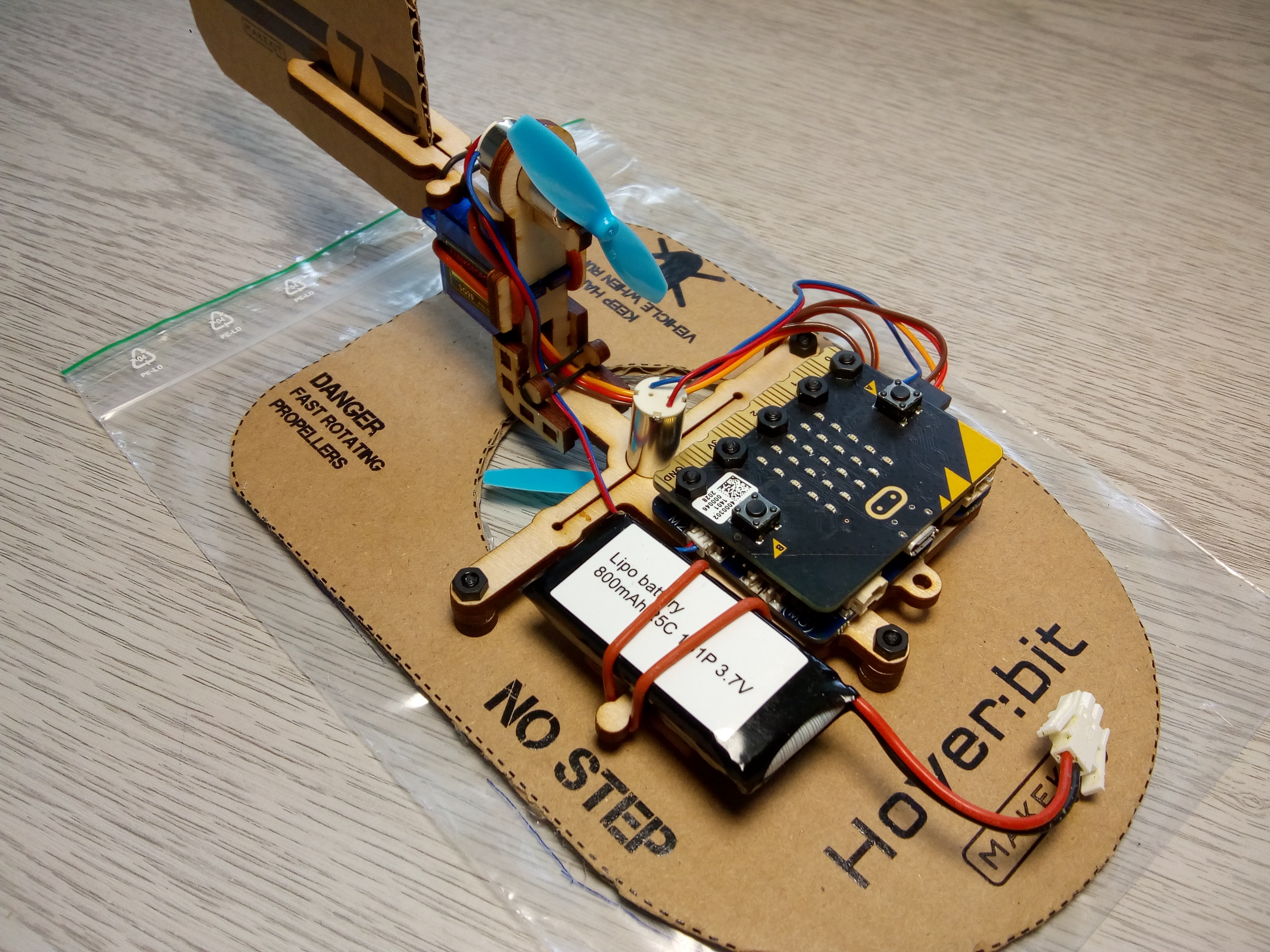
MakeKit’s Hover:bit is a kit for micro:bit containing all the parts you need to build your own hovercraft. Add a couple of micro:bits for control and you’ll have hours of fun drifting or racing your craft, whilst learning how hovercraft are made and controlled.
The kit is just the starting point. All the parts and code are Open Source so you can adapt and modify both the frame, control surfaces and code if you want to experiment and extend its capabilities.
This Getting Started guide will give you a run though building and driving the Hover:bit and provide links to more in depth material from MakeKit if you need it.
Unboxing
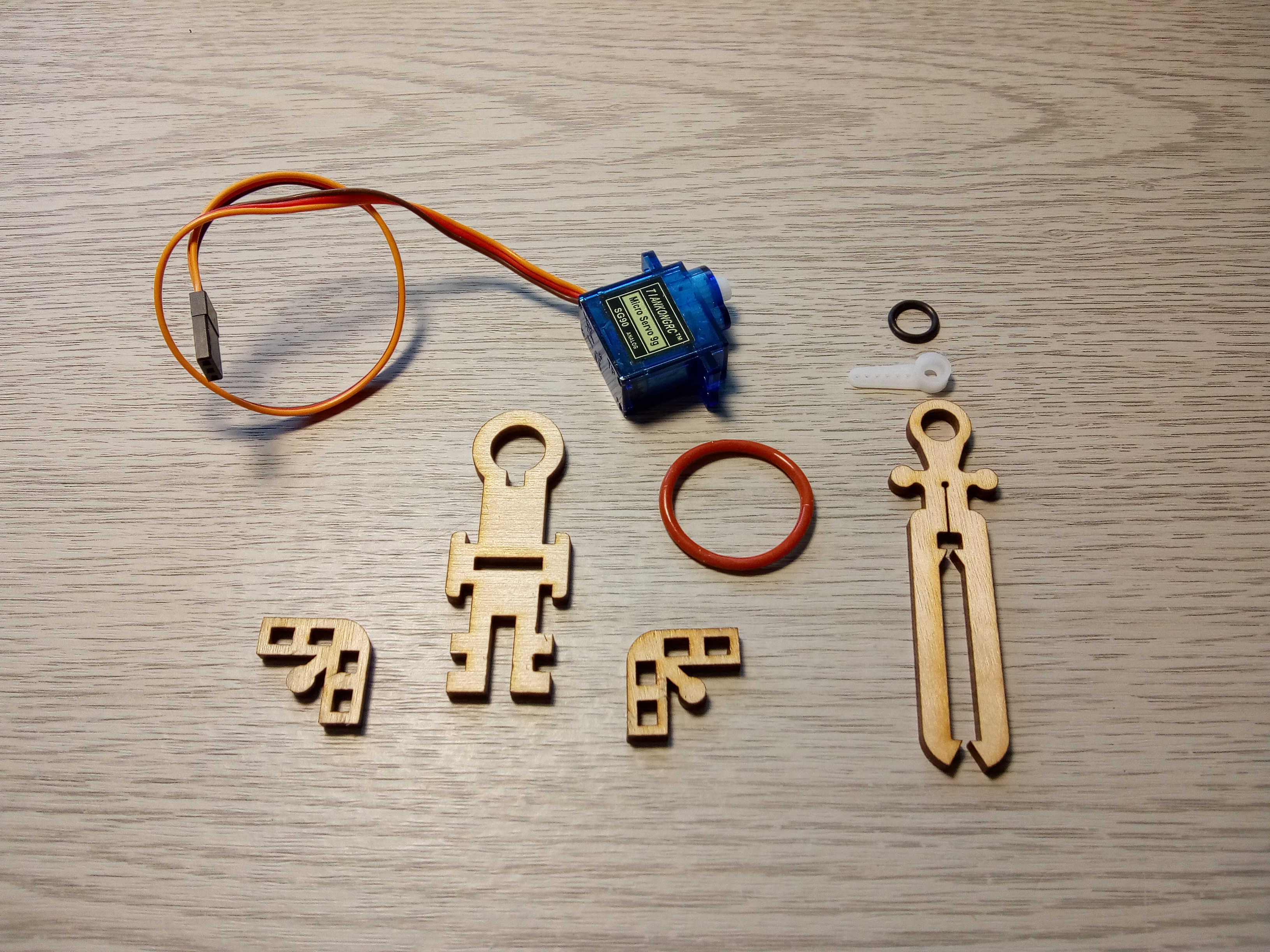
Start by unboxing the kit and checking you have all the components. The image below shows them all laid out.
The kit contains high quality parts which fit together easily and there’s micro:bit Block code ready to download or you can create your own.
Driving is quite intuitive, even if you haven’t controlled a hovercraft before and there are also a few spare parts for if you have a driving incident but the kit is strong enough to take a few knocks.

Tools & micro:bits
The build requires a few common modelling tools to cut out parts and shape the base and rudder. The glue gun is optional to stick the air-bag to the hovercraft base.
You also need to add your own micro:bits. One for the hand controller and one for the hovercraft itself. Both V1 or V2 micro:bits work. There’s also an App for iOS as an alternative controller but we didn’t try that.

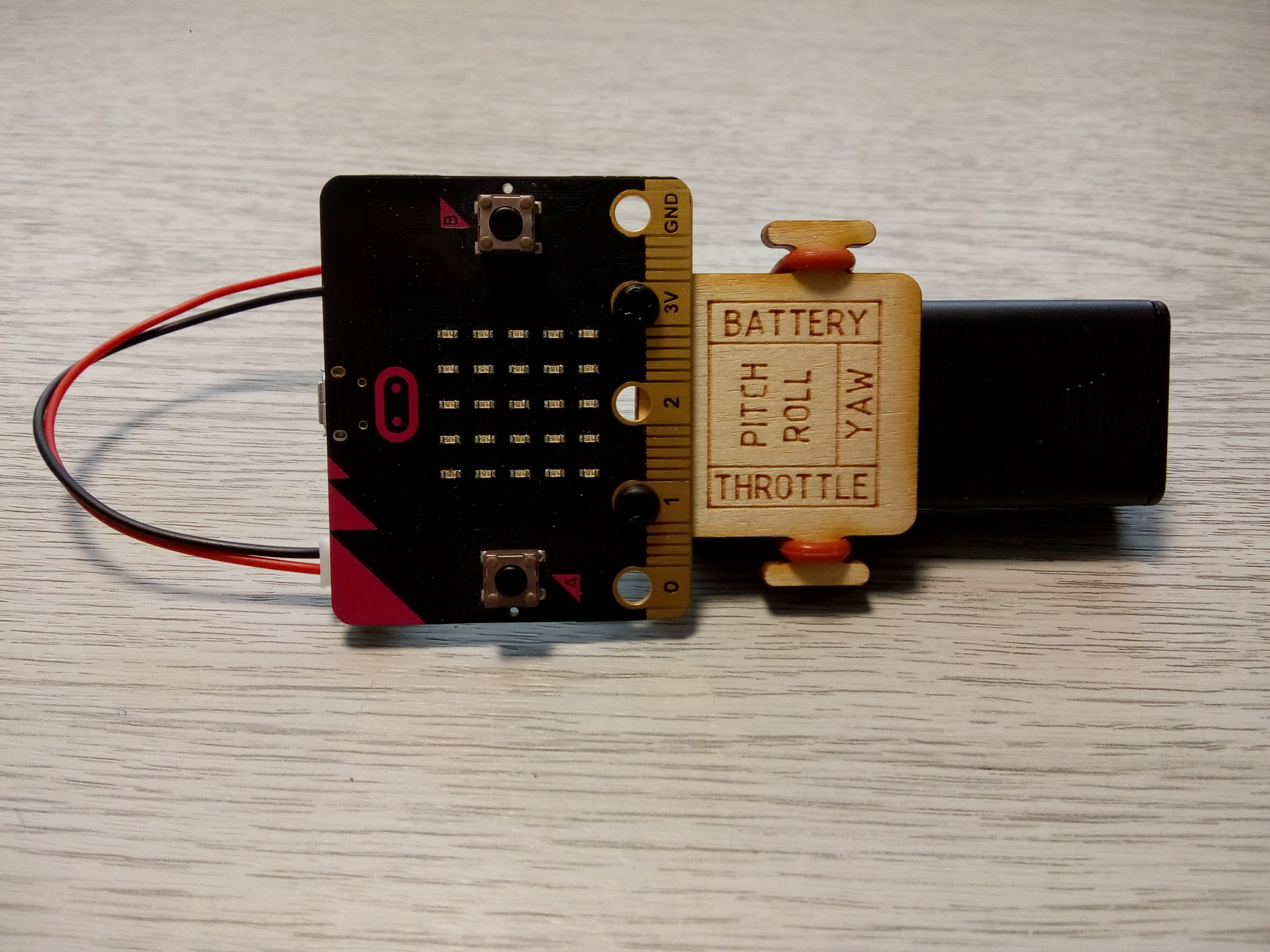
Hand controller
We built a micro:bit hand controller but as an alternative, you can use either an Android or iOS smartphone app. We used a V1 micro:bit but you can use any version.
- Attach the micro:bit using two M3 x 8mm nylon nuts and bolts to the controller board.
- Fit the battery holder to the back of the board with the rubber band.
- Connect the battery lead to the micro:bit.
Hovercraft base
The next few steps build up the hovercraft ready for testing.
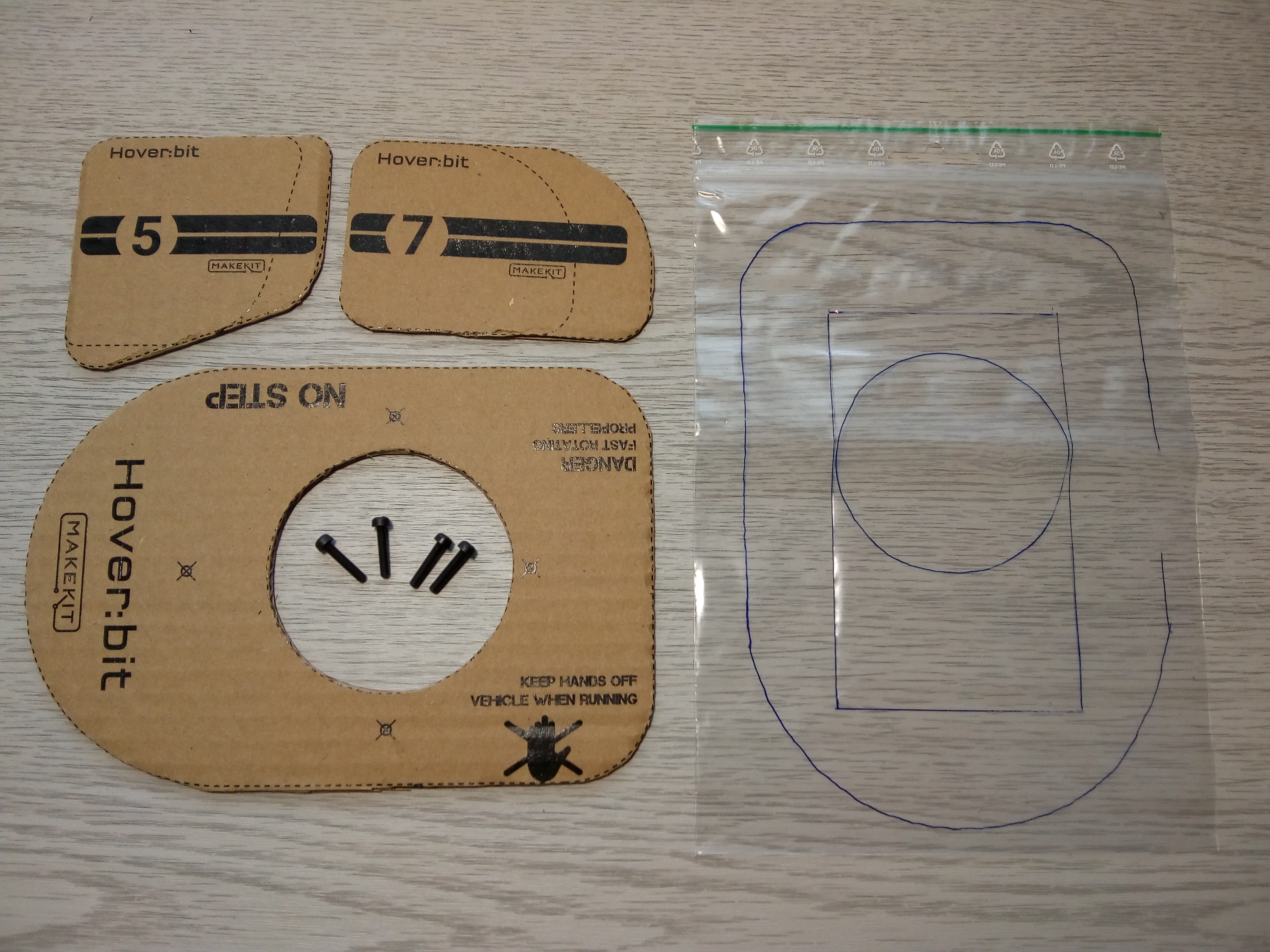
- Cut out the hovercraft base from the box by following the markings, including the centre fan hole.
- Cut the rudder shapes from the box lid. Feel free to make your own distinctive shapes.
- Use the base as template to mark out the bag that will form the hovercraft skirt.
- Cut out the circular fan hole in the bag then cut out the rectangular shape from just one side of the bag to form the air outlet.
- Puncture the base at the 4 bolt holes then push four M3 x 12mm nylon bolts upwards through the base – these will hold the plywood frame.
Using a hot glue gun or contact adhesive, glue the skirt to the base. We used the hot glue method:
- Put a folded sheet of A4 in the cut-out bag, this stops the plastic melting.
- Turn the base face down and glue round the fan hole and attach the bag – make sure the rectangular hole is facing upwards.
- Glue round the edge of the base and press the bag in place – when the hovercraft fan starts this forms an air cushion which the craft floats on.
Hovercraft controller
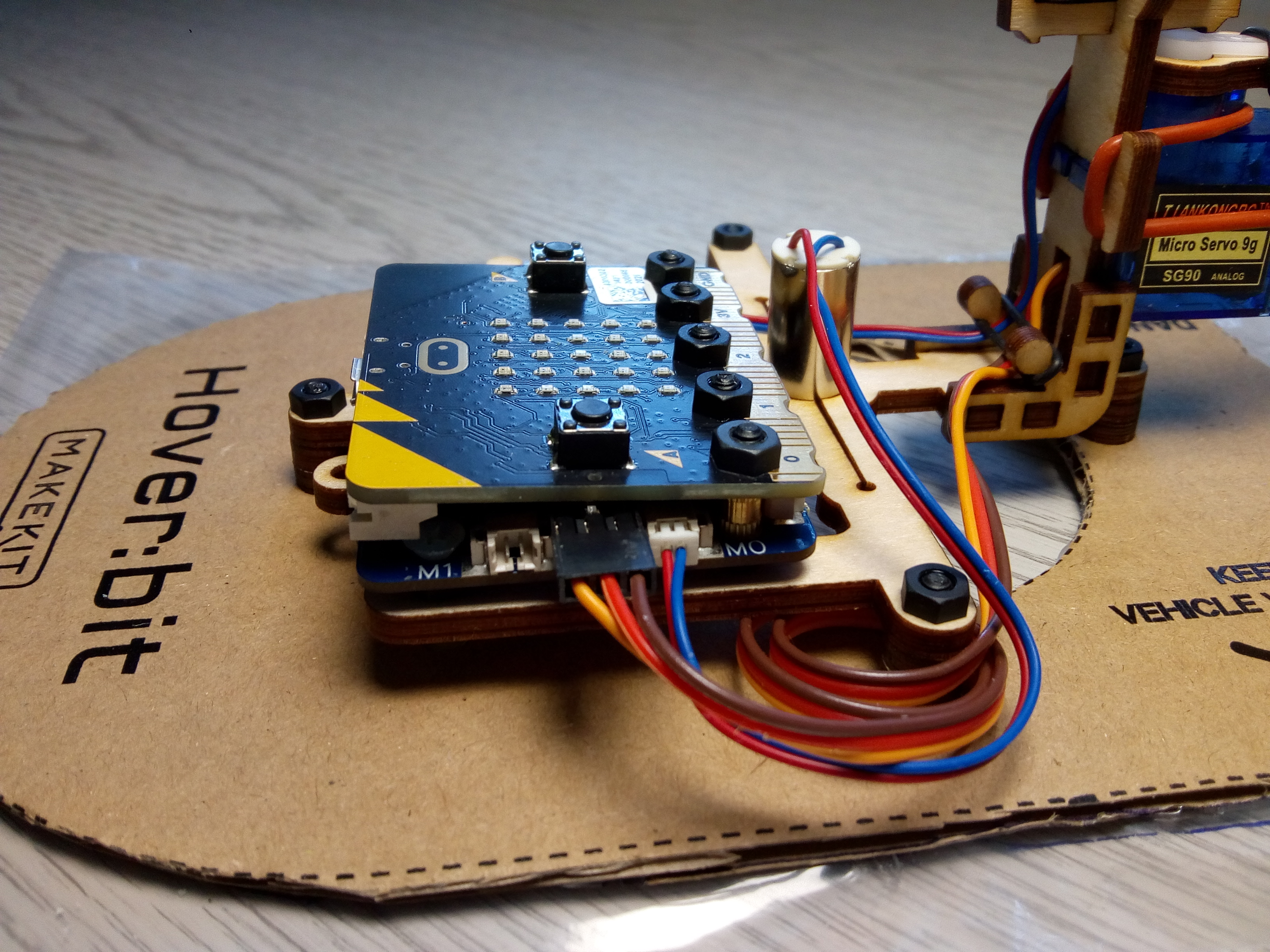
Build up the hovercraft controller by attaching the Multi:bit motor control board that comes in the kit to a micro:bit that will act as the receiver. The assembled controller is then attached to the ply frame and mounted on the hovercraft base. We used a V2 micro:bit.
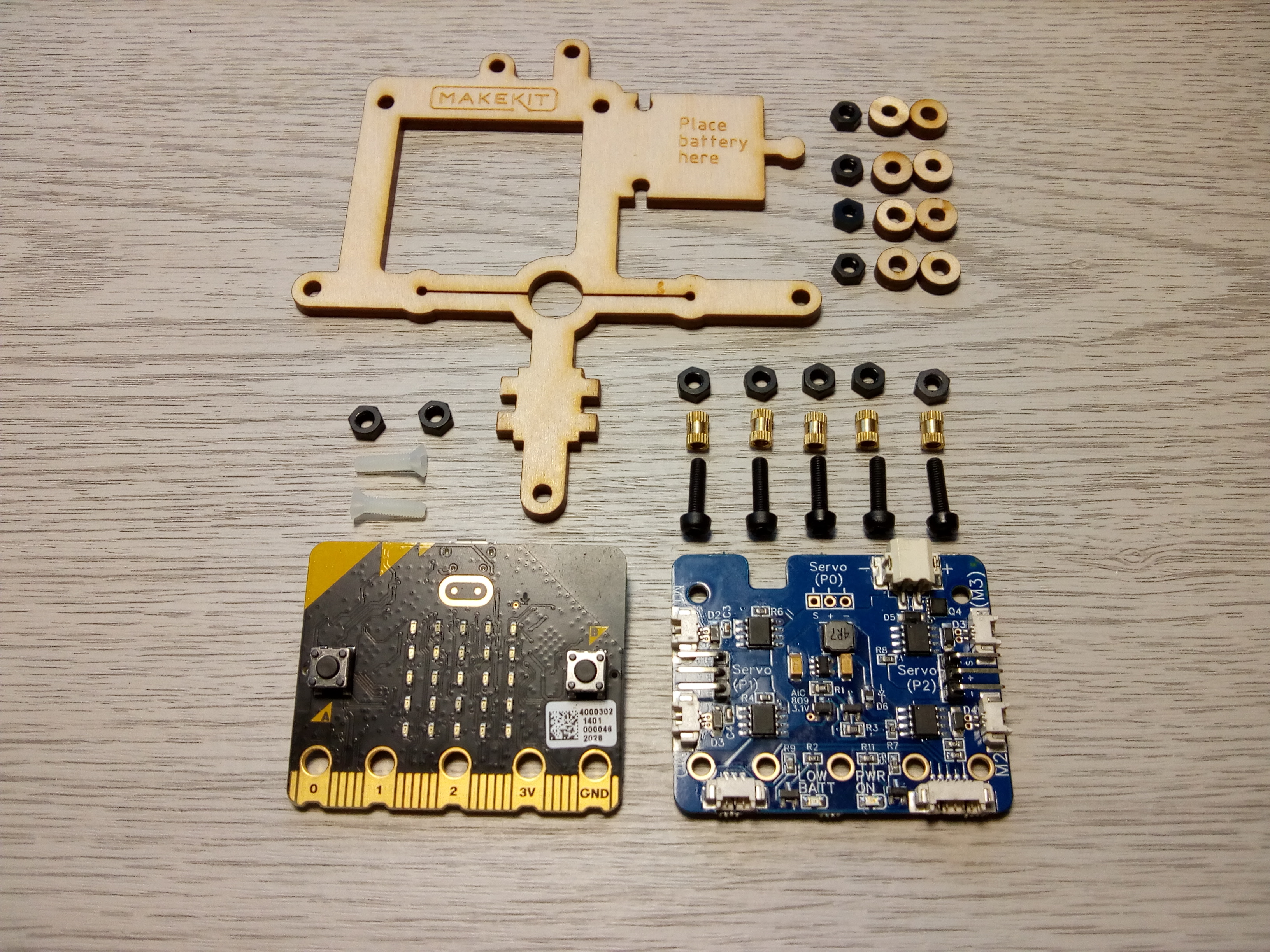
- Place the control board so the connectors face upwards. For each of the five M3 x 12mm bolts place them through the contact holes, facing upwards and screw down a brass spacer. Tighten it just enough to make a good electrical contact.
- Place the two white countersunk bolts in the top holes, facing downwards and attach their nuts.
- Attach the micro:bit to the control board with the LED matrix facing upwards.
- Using five nylon nuts, tighten them just enough to make a good electrical contact.
- Attach the whole controller to the ply frame using the two white nylon bolts and nuts.
- Place 2 wood spacers over each of the base bolts and attach the frame securing it with 4 nuts.

Rudder assembly
Build up the parts to form the rudder assembly and support pillar.
- Insert the servo support flange through the rudder support, this was a tight fit.
- Use the large brown elastic band to fix the servo to the support.
- Push the servo arm into the ply rudder support and fix with a small black elastic band.
- Add one of the right angle ply brackets to the ply support.
- Mount the whole assembly onto the main frame and add the other right angle ply bracket.
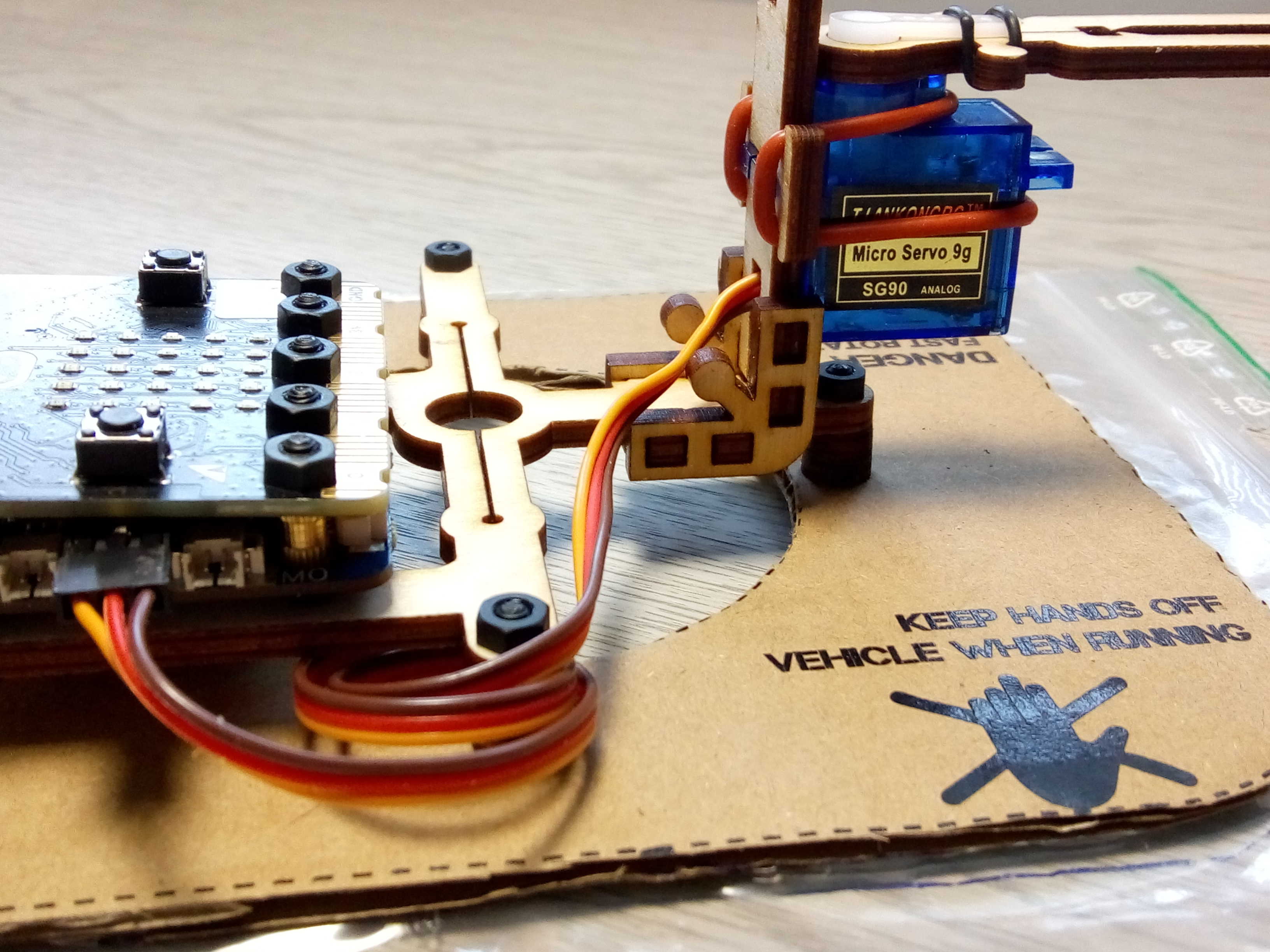
- Route the servo cable to not interfere with the propellers.
- Connect it to the controller’s left hand 3 pin header. Orange wire nearest the front of the craft, brown wire to the rear as shown below.
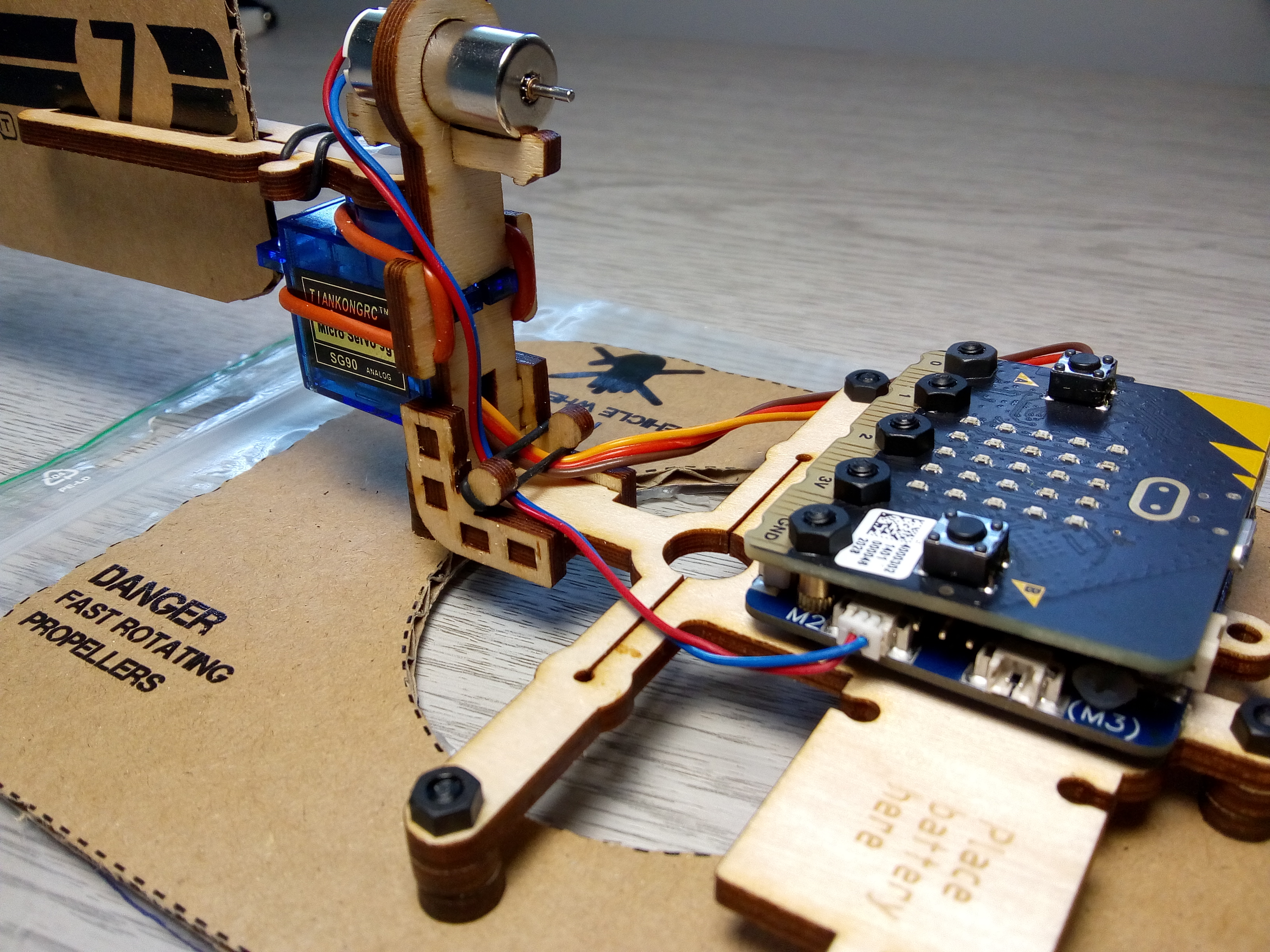
Tail motor
- Fit the ply wedge so that the cutouts interlock then push the motor through its housing until it clicks into place.
- Route the cable away from any blades and connect to the M2 connection on the controller board.
- Fit a small black elastic band over the tail lugs to hold the motor and servo cables securely.
- Attach the rudder surface.
Lift motor
- Push the motor through its housing on the main frame until it’s flush with the underside of the plywood frame.
- Route the cable away from any blades and connect to the M0 connector of the controller.
Coding
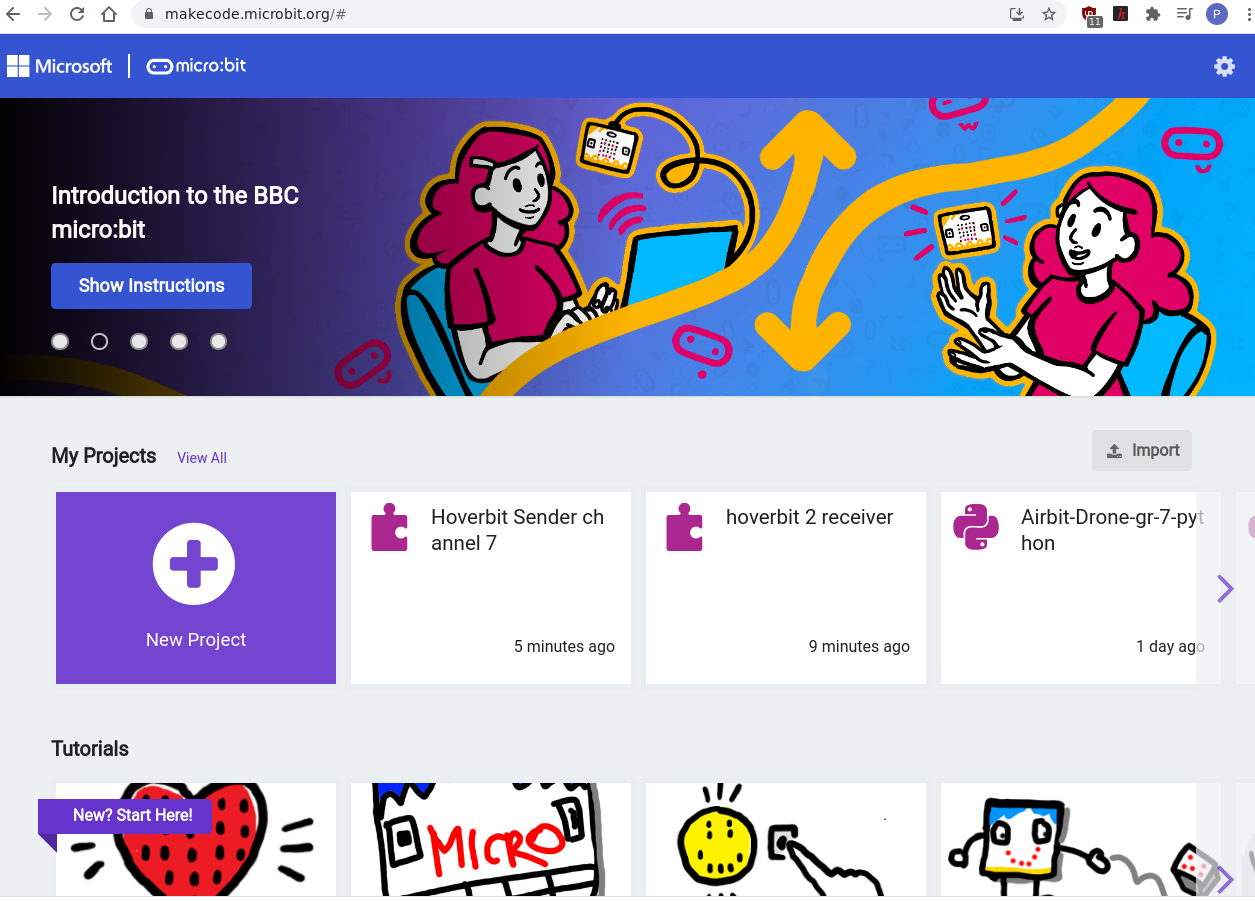
We used the Microsoft Makecode environment running in a Chrome browser on a Linux desktop PC, but you can use a Windows or Mac PC if that’s what you have.
- Open your file manager and create a directory to save the code files.
- Download the code for the controller and save to the above directory.
- Download the code for the hovercraft controller to the directory.
- Drag and drop the controller code onto the Makecode homepage and it will load the code for that project.
- Connect your hand controller micro:bit to your PC with a USB cable.
- Click the three dots icon on the Download button and connect your micro:bit.
- Download the code to the micro:bit by pressing Download.
- When the download has finished disconnect the micro:bit.
- Switch the battery on and the Radio Group number should scroll across the screen.
Make sure to use the same Radio Group number for both the Transmitter and Hover:bit controller
- Now return to the Makecode home screen and load the Hover:bit controller code.
- Attach a USB cable to the micro:bit connector on the hovercraft, not the controller board.
- Repeat the steps above to download the code to the micro:bit.
Testing
Before fitting the propellers, test the Hover:bit to make sure that everything is working:
- Fit the battery to the frame using a brown elastic band.
- Connect the battery lead to the controller board by squeezing the horns and pushing it into place. The connector only fits one way round.
- Connecting the battery turns on the controller and the Radio Group number should appear on the LED matrix followed by a zero.
Turn on the hand controller and the same Radio Group number should display on the LED matrix. The bottom left LED should be on indicating tail motor power and a single LED should move around the centre of the matrix indicating the yaw attitude.
- Moving the controller should make the rudder move left and right.
- Press the A & B buttons together so the fan motor starts running .
- Increase the tail motor speed by pressing B and reduce it by pressing A.
- Press A & B buttons again to turn off the motors.
There is an emergency stop if you shake the controller.
If everything is working, remove the power connector by squeezing the horns to release it to turn off the power, then fit the propellers:
- Fit the tail propeller marked CW (for the Clockwise) to the tail motor
- Fit the lift propeller marked CCW (Counter-clockwise) to the lift motor – take care to fit them to the correct motors
Check that the propellers rotate without obstruction.
Charging
Hover:bit comes with an 800mAh battery which can power it for several minutes. Whenever the craft is not in use, unplug the battery connector so that it doesn’t fully discharge which would damage it.
To charge the battery:
- Unplug the battery connector to turn off the hovercraft.
- Plug the battery connector into the LiPo charging board supplied in the kit
- Connect the LiPo charging board to a USB port on your PC . A red LED will be on while the battery is charging.
- When the battery is fully charged, which takes about 1 hour, the red LED turns green.
Hover:bit is now ready for its first drift.
Drifting
Hover:bit can run indoors and out but it needs a smooth surface to run best. We suggest trying your first run indoors in a large, clear room.
Only handle the Hover:bit when the motors are switched off!
- Make sure the Hover:bit is pointing away from you.
- Connect the battery to turn on the Hover:bit.
- Press both the A & B buttons together to start the lift motor.
- Click the B button gradually so the tail motor increases speed until the craft starts to move off and hover.
- Roll the controller to steer.
- Click the A button to slow down.
- Press the A & B buttons together to stop the motors.
- Disconnect the battery to switch the Hover:bit controller off.
Congratulations, you’ve just made your own hovercraft and taken it for its first drift!
Summary
Hover:bit kit is a high-quality kit that is simple and well designed to make a really fun project suitable for younger makers, that is both engaging and educational.
With only a little practice the finished hovercraft is safe and fun to drive. With 2 or more, they would be great to race around an obstacle course.
MakeKit provides loads of good quality documentation and videos in English and Norwegian on how to build, code and drift the Hover:bit including an in-depth look at how the control code works here:
https://www.makekit.no/en/docs/
There are additional ports on the motor controller board which are programmable using the Make:code library and there’s a MakeKit blog with loads of ideas for other projects:
Drift away!